新闻分类 新闻分类联系方式
- 联系人:石川
- 电话:18621383601
- 邮件:sc@gongboshi.com
友情链接 |
|
首页 > 新闻中心 > 优傲|优傲机器人|机器人视觉技术的应用
优傲|优傲机器人|机器人视觉技术的应用
发布时间:2022-04-18 浏览次数:227 返回列表工博士机器人技术有限公司是集机器人集成应用、销售、技术服务为一体的智能制造领域的科技服务企业,拥有工业机器人焊接、研磨、组装、包装、堆运等集成应用优势,获得了许多软件和形成了工业机器人系统解决方案的完整产业价值链。
优傲机器人常用型号:UR3、UR5、UR10、UR16(均有带e版本)
机器人视觉技术主要应用在下述两个方面:
一是给装配机器 人(机械手)配备视觉装置,要求视觉系统必
须做到:
(1)识别传送带上所要装配的机械零件;
(2)确定该零件的空间位置。
据此信息控制机械手的动作,做到准确装配。
还可用机器人视觉系统做机械零件的检查:
(1)表面粗糙度的质量检查,检查是否有毛剌、破裂.空洞和生
锈等缺陷;
(2)检查工件的完好性;
(3)量测工件的极限尺寸:
(4)检查工件的磨损等。
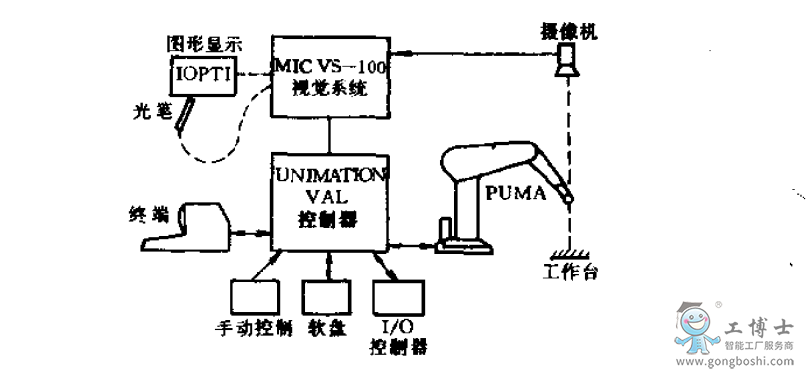
机槭手可将不合格的工件拿走。此外,机械手还可根据视觉的反馈信息,进行自动焊接、喷漆和自动上下移等。二是给可行走机器人配备视觉装置,要求视觉系统能够识别室内或室外的景物,进行道路跟踪和自主导航。用它可完成危险材料的搬运、野外敌后侦察和敌区的扫雷等任务。为了使读者对机器人视觉技术的应用有一具体了解,下面以80年代初在国际市场.上怍为商品出售的-一个通用的机器人系统PUMA /VS- 100为例作简要说明。PUMA/VS- 100的蔡统框图
其特点为:
(1)能够在线实时地使用$
(2)设有坐标变换子程序,机器人的坐标可用直角坐标系定
义;
(3)对机器人动作颛序编制程序时,其中的定位参数必须给出
实际的数据;
(4)可以用外部存储器(软盘)来记忆程序和数据。
|


 联系我们
联系我们