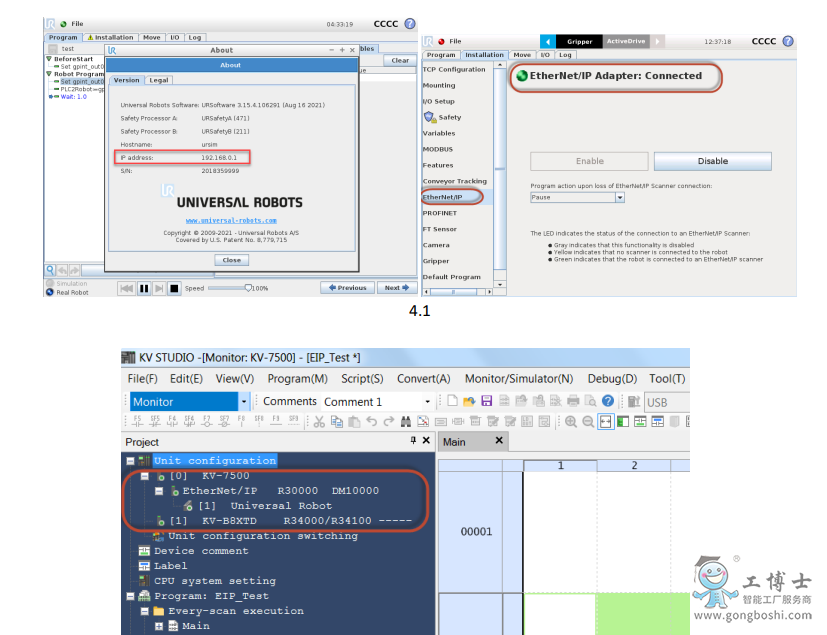
优傲机器人常用型号:UR3、UR5、UR10、UR16(均有带e版本)
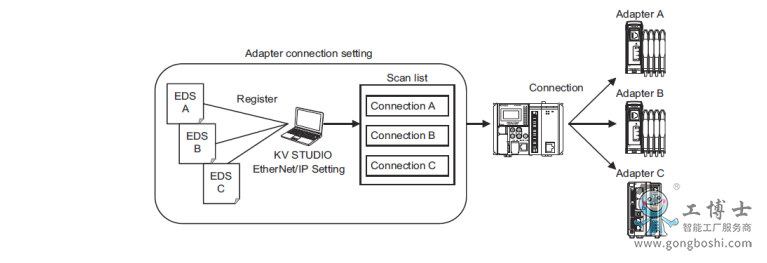
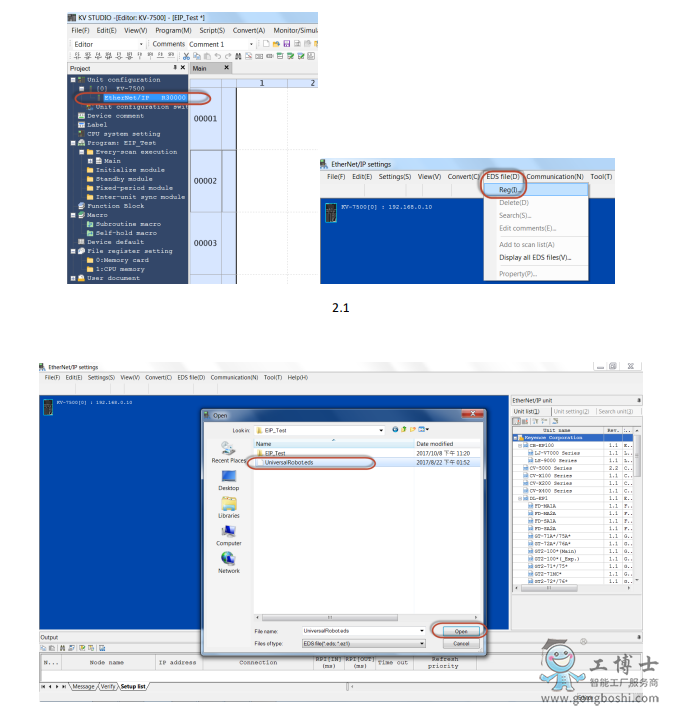
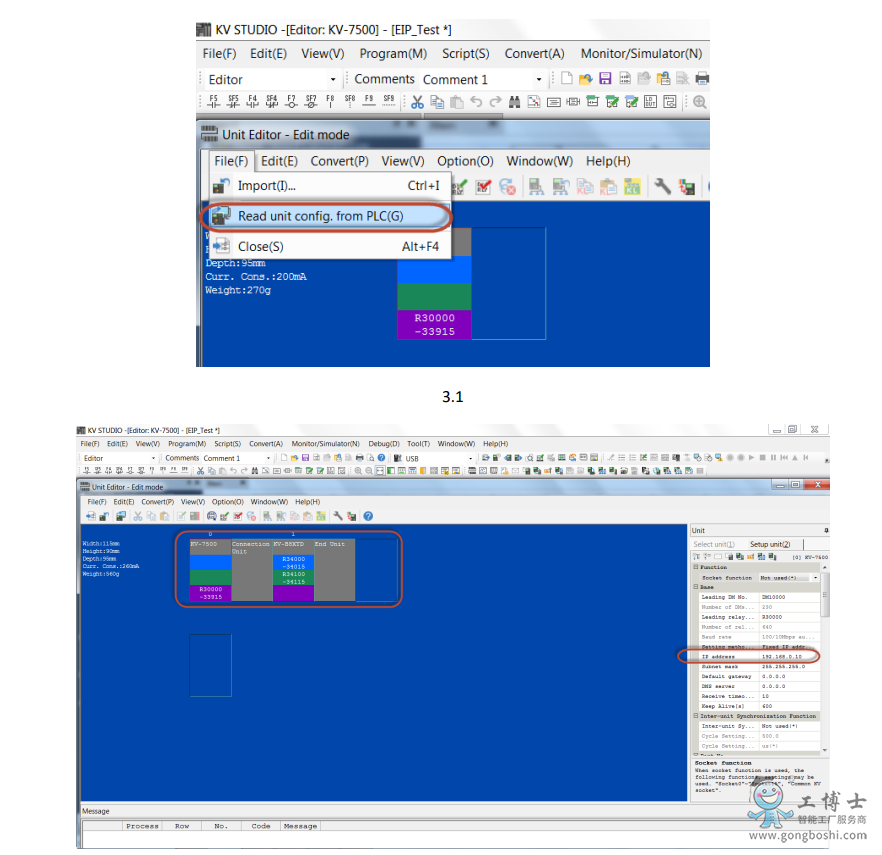
EDS文件及其有何作用?电子数据表( EDS )是简单的 ASCII 文件,描述了设备如何在 EtherNet / IP 网络上使用。它描述了设备中可用的对象、属性和服务。至少, EDS 文件传递了网络工具识别设备所需的身份信息。

文章来源于:网络
侵权删
UR|优傲机器人

 联系我们
联系我们
 新闻分类联系方式 新闻分类联系方式
站内搜索 友情链接 |
新闻中心 优傲|UR机器人|EDS文件如何在以太网通讯上使用
发布时间:2022-04-12 浏览次数:270 返回列表
工博士机器人技术有限公司是集机器人集成应用、销售、技术服务为一体的智能制造领域的科技服务企业,拥有工业机器人焊接、研磨、组装、包装、堆运等集成应用优势,获得了许多软件和形成了工业机器人系统解决方案的完整产业价值链。
优傲机器人常用型号:UR3、UR5、UR10、UR16(均有带e版本) EDS文件及其有何作用?电子数据表( EDS )是简单的 ASCII 文件,描述了设备如何在 EtherNet / IP 网络上使用。它描述了设备中可用的对象、属性和服务。至少, EDS 文件传递了网络工具识别设备所需的身份信息。 文章来源于:网络 侵权删 |
联系热线: 联系人:石川 联系地址:上海市黄浦区北京东路668号科技京城G区
技术和报价服务:星期一至星期六8:00-22:00 UR|优傲机器人